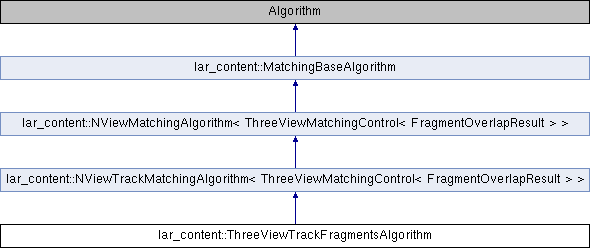
ThreeViewTrackFragmentsAlgorithm class. More...
#include <ThreeViewTrackFragmentsAlgorithm.h>
Public Types | |
| typedef NViewTrackMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | BaseAlgorithm |
 Public Types inherited from lar_content::NViewMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > Public Types inherited from lar_content::NViewMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| typedef ThreeViewMatchingControl< FragmentOverlapResult > | MatchingType |
Public Member Functions | |
| ThreeViewTrackFragmentsAlgorithm () | |
| Default constructor. More... | |
| void | UpdateForNewCluster (const pandora::Cluster *const pNewCluster) |
| Update to reflect addition of a new cluster to the problem space. More... | |
| void | RebuildClusters (const pandora::ClusterList &rebuildList, pandora::ClusterList &newClusters) const |
| Rebuild clusters after fragmentation. More... | |
| Public Member Functions inherited from lar_content::NViewTrackMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| NViewTrackMatchingAlgorithm () | |
| Default constructor. More... | |
| virtual | ~NViewTrackMatchingAlgorithm () |
| Destructor. More... | |
| const TwoDSlidingFitResult & | GetCachedSlidingFitResult (const pandora::Cluster *const pCluster) const |
| Get a sliding fit result from the algorithm cache. More... | |
| unsigned int | GetSlidingFitWindow () const |
| Get the layer window for the sliding linear fits. More... | |
| virtual bool | MakeClusterSplits (const SplitPositionMap &splitPositionMap) |
| Make cluster splits. More... | |
| virtual bool | MakeClusterSplit (const pandora::CartesianVector &splitPosition, const pandora::Cluster *&pCurrentCluster, const pandora::Cluster *&pLowXCluster, const pandora::Cluster *&pHighXCluster) const |
| Make a cluster split. More... | |
| virtual void | UpdateUponDeletion (const pandora::Cluster *const pDeletedCluster) |
| Update to reflect cluster deletion. More... | |
| virtual void | SelectInputClusters (const pandora::ClusterList *const pInputClusterList, pandora::ClusterList &selectedClusterList) const |
| Select a subset of input clusters for processing in this algorithm. More... | |
| virtual void | PrepareInputClusters (pandora::ClusterList &preparedClusterList) |
| Perform any preparatory steps required on the input clusters, e.g. caching expensive fit results. More... | |
| virtual void | SetPfoParticleId (PandoraContentApi::ParticleFlowObject::Parameters &pfoParameters) const |
| Set pfo particle id. More... | |
| Public Member Functions inherited from lar_content::NViewMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| NViewMatchingAlgorithm () | |
| Default constructor. More... | |
| virtual | ~NViewMatchingAlgorithm () |
| Destructor. More... | |
| const std::string & | GetClusterListName (const pandora::HitType hitType) const |
| Get the cluster list name corresponding to a specified hit type. More... | |
| const pandora::ClusterList & | GetInputClusterList (const pandora::HitType hitType) const |
| Get the input cluster list corresponding to a specified hit type. More... | |
| const pandora::ClusterList & | GetSelectedClusterList (const pandora::HitType hitType) const |
| Get the selected cluster list corresponding to a specified hit type. More... | |
| Public Member Functions inherited from lar_content::MatchingBaseAlgorithm | |
| MatchingBaseAlgorithm () | |
| Default constructor. More... | |
| virtual | ~MatchingBaseAlgorithm () |
| Destructor. More... | |
| virtual bool | MakeClusterMerges (const ClusterMergeMap &clusterMergeMap) |
| Merge clusters together. More... | |
| virtual bool | CreateThreeDParticles (const ProtoParticleVector &protoParticleVector) |
| Create particles using findings from recent algorithm processing. More... | |
| virtual void | SetPfoParameters (const ProtoParticle &protoParticle, PandoraContentApi::ParticleFlowObject::Parameters &pfoParameters) const |
| Set Pfo properties. More... | |
Protected Types | |
| typedef std::unordered_map< const pandora::CaloHit *, const pandora::Cluster * > | HitToClusterMap |
| typedef std::unordered_map< const pandora::Cluster *, unsigned int > | ClusterToMatchedHitsMap |
| typedef std::vector< FragmentTensorTool * > | TensorToolVector |
Protected Member Functions | |
| void | PerformMainLoop () |
| Main loop over cluster combinations in order to populate the overlap container. Responsible for calling CalculateOverlapResult. More... | |
| void | CalculateOverlapResult (const pandora::Cluster *const pClusterU, const pandora::Cluster *const pClusterV, const pandora::Cluster *const pClusterW) |
| Calculate cluster overlap result and store in container. More... | |
| pandora::StatusCode | CalculateOverlapResult (const TwoDSlidingFitResult &fitResult1, const TwoDSlidingFitResult &fitResult2, const pandora::ClusterList &inputClusterList, const pandora::Cluster *&pBestMatchedCluster, FragmentOverlapResult &fragmentOverlapResult) const |
| Calculate overlap result for track fragment candidate consisting of two sliding fit results and a list of available clusters. More... | |
| pandora::StatusCode | GetProjectedPositions (const TwoDSlidingFitResult &fitResult1, const TwoDSlidingFitResult &fitResult2, pandora::CartesianPointVector &projectedPositions) const |
| Get the list of projected positions, in the third view, corresponding to a pair of sliding fit results. More... | |
| pandora::StatusCode | GetMatchedHits (const pandora::ClusterList &inputClusterList, const pandora::CartesianPointVector &projectedPositions, HitToClusterMap &hitToClusterMap, pandora::CaloHitList &matchedCaloHits) const |
| Get the list of hits associated with the projected positions and a useful hit to cluster map. More... | |
| pandora::StatusCode | GetMatchedClusters (const pandora::CaloHitList &matchedHits, const HitToClusterMap &hitToClusterMap, pandora::ClusterList &matchedClusters, const pandora::Cluster *&pBestMatchedCluster) const |
| Get the list of the relevant clusters and the address of the single best matched cluster. More... | |
| void | GetFragmentOverlapResult (const pandora::CartesianPointVector &projectedPositions, const pandora::CaloHitList &matchedHits, const pandora::ClusterList &matchedClusters, FragmentOverlapResult &fragmentOverlapResult) const |
| Get the populated fragment overlap result. More... | |
| bool | CheckMatchedClusters (const pandora::CartesianPointVector &projectedPositions, const pandora::ClusterList &matchedClusters) const |
| Whether the matched clusters are consistent with the projected positions. More... | |
| bool | CheckOverlapResult (const FragmentOverlapResult &overlapResult) const |
| Whether the matched clusters and hits pass the algorithm quality cuts. More... | |
| void | ExamineOverlapContainer () |
| Examine contents of overlap container, collect together best-matching 2D particles and modify clusters as required. More... | |
| pandora::StatusCode | ReadSettings (const pandora::TiXmlHandle xmlHandle) |
| Protected Member Functions inherited from lar_content::NViewTrackMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| void | AddToSlidingFitCache (const pandora::Cluster *const pCluster) |
| Add a new sliding fit result, for the specified cluster, to the algorithm cache. More... | |
| void | RemoveFromSlidingFitCache (const pandora::Cluster *const pCluster) |
| Remova an existing sliding fit result, for the specified cluster, from the algorithm cache. More... | |
| virtual void | TidyUp () |
| Tidy member variables in derived class. More... | |
| Protected Member Functions inherited from lar_content::NViewMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| MatchingType & | GetMatchingControl () |
| Get the matching control. More... | |
| virtual void | SelectAllInputClusters () |
| Select a subset of input clusters for processing in this algorithm. More... | |
| virtual void | PrepareAllInputClusters () |
| Perform any preparatory steps required, e.g. caching expensive fit results for clusters. More... | |
Protected Attributes | |
| std::string | m_reclusteringAlgorithmName |
| Name of daughter algorithm to use for cluster re-building. More... | |
| TensorToolVector | m_algorithmToolVector |
| The algorithm tool list. More... | |
| unsigned int | m_nMaxTensorToolRepeats |
| The maximum number of repeat loops over tensor tools. More... | |
| float | m_minXOverlap |
| requirement on minimum X overlap for associated clusters More... | |
| float | m_minXOverlapFraction |
| requirement on minimum X overlap fraction for associated clusters More... | |
| float | m_maxPointDisplacementSquared |
| maximum allowed distance (squared) between projected points and associated hits More... | |
| float | m_minMatchedSamplingPointFraction |
| minimum fraction of matched sampling points More... | |
| unsigned int | m_minMatchedHits |
| minimum number of matched calo hits More... | |
| Protected Attributes inherited from lar_content::NViewMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| MatchingType | m_matchingControl |
| The matching control. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from lar_content::NViewTrackMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > > | |
| static bool | SortSplitPositions (const pandora::CartesianVector &lhs, const pandora::CartesianVector &rhs) |
| Sort split position cartesian vectors by increasing x coordinate. More... | |
ThreeViewTrackFragmentsAlgorithm class.
Definition at line 31 of file ThreeViewTrackFragmentsAlgorithm.h.
| typedef NViewTrackMatchingAlgorithm<ThreeViewMatchingControl<FragmentOverlapResult> > lar_content::ThreeViewTrackFragmentsAlgorithm::BaseAlgorithm |
Definition at line 34 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
Definition at line 142 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
Definition at line 69 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
Definition at line 146 of file ThreeViewTrackFragmentsAlgorithm.h.
| lar_content::ThreeViewTrackFragmentsAlgorithm::ThreeViewTrackFragmentsAlgorithm | ( | ) |
Default constructor.
Definition at line 21 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protectedvirtual |
Calculate cluster overlap result and store in container.
| pCluster1 | address of cluster1 |
| pCluster2 | address of cluster2 |
| pCluster3 | address of cluster3 |
Implements lar_content::MatchingBaseAlgorithm.
|
protected |
Calculate overlap result for track fragment candidate consisting of two sliding fit results and a list of available clusters.
| fitResult1 | the first sliding fit result |
| fitResult2 | the second sliding fit result |
| inputClusterList | the input cluster list |
| pBestMatchedCluster | to receive the address of the best matched cluster |
| fragmentOverlapResult | to receive the populated fragment overlap result |
|
protected |
Whether the matched clusters are consistent with the projected positions.
| projectedPositions | the list of projected positions |
| matchedClusters | the list of matched clusters |
Definition at line 554 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protected |
Whether the matched clusters and hits pass the algorithm quality cuts.
| fragmentOverlapResult | the fragment overlap result |
Definition at line 609 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protectedvirtual |
Examine contents of overlap container, collect together best-matching 2D particles and modify clusters as required.
Implements lar_content::MatchingBaseAlgorithm.
Definition at line 623 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protected |
Get the populated fragment overlap result.
| projectedPositions | the list of projected positions |
| matchedHits | the list of matched hits |
| matchedClusters | the list of matched clusters |
| fragmentOverlapResult | to receive the populated fragment overlap result |
Definition at line 521 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protected |
Get the list of the relevant clusters and the address of the single best matched cluster.
| matchedHits | the list of matched calo hits |
| hitToClusterMap | the hit to cluster map |
| matchedClusters | to receive the list of matched clusters |
| pBestMatchedCluster | to receive the address of the single best matched cluster |
Definition at line 470 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protected |
Get the list of hits associated with the projected positions and a useful hit to cluster map.
| inputClusterList | the input cluster list |
| projectedPositions | the list of projected positions |
| hitToClusterMap | to receive the hit to cluster map |
| matchedCaloHits | to receive the list of associated calo hits |
Definition at line 416 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protected |
Get the list of projected positions, in the third view, corresponding to a pair of sliding fit results.
| fitResult1 | the first sliding fit result |
| fitResult2 | the second sliding fit result |
| projectedPositions | to receive the list of projected positions |
Definition at line 273 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protectedvirtual |
Main loop over cluster combinations in order to populate the overlap container. Responsible for calling CalculateOverlapResult.
Reimplemented from lar_content::NViewMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > >.
Definition at line 117 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protectedvirtual |
Reimplemented from lar_content::NViewTrackMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > >.
Definition at line 645 of file ThreeViewTrackFragmentsAlgorithm.cc.
| void lar_content::ThreeViewTrackFragmentsAlgorithm::RebuildClusters | ( | const pandora::ClusterList & | rebuildList, |
| pandora::ClusterList & | newClusters | ||
| ) | const |
Rebuild clusters after fragmentation.
| rebuildList | the list of clusters containing hits to be rebuilt |
| newClusters | the output list of clusters |
Definition at line 102 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
virtual |
Update to reflect addition of a new cluster to the problem space.
| pNewCluster | address of the new cluster |
Reimplemented from lar_content::NViewTrackMatchingAlgorithm< ThreeViewMatchingControl< FragmentOverlapResult > >.
Definition at line 33 of file ThreeViewTrackFragmentsAlgorithm.cc.
|
protected |
The algorithm tool list.
Definition at line 147 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
maximum allowed distance (squared) between projected points and associated hits
Definition at line 153 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
minimum number of matched calo hits
Definition at line 155 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
minimum fraction of matched sampling points
Definition at line 154 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
requirement on minimum X overlap for associated clusters
Definition at line 151 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
requirement on minimum X overlap fraction for associated clusters
Definition at line 152 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
The maximum number of repeat loops over tensor tools.
Definition at line 149 of file ThreeViewTrackFragmentsAlgorithm.h.
|
protected |
Name of daughter algorithm to use for cluster re-building.
Definition at line 144 of file ThreeViewTrackFragmentsAlgorithm.h.
 1.8.11
1.8.11

